Basic Stereo Geometry
The simple stereo camera system is shown below. The cameras are separated by a baseline, , and their focal length is . We have some point at a distance in the camera coordinate system. We can also measure the distances , , which are the points of intersection with the left and right planes.
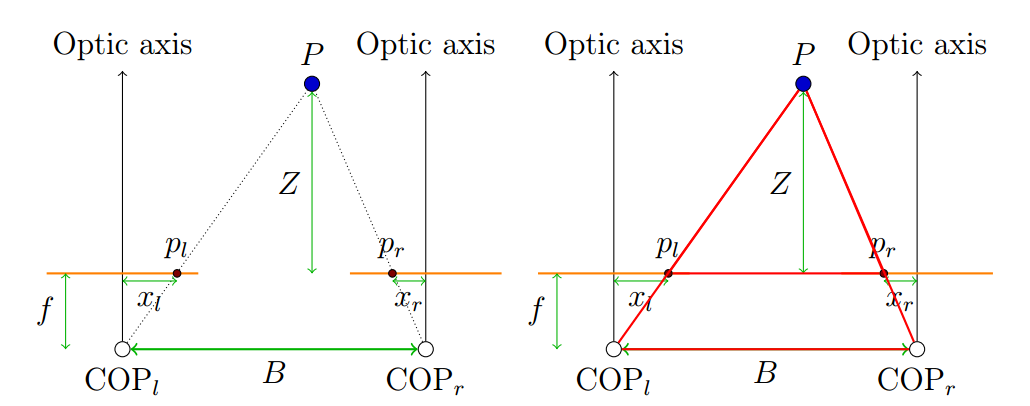
Note that ,
With similar triangles, we have the relationship: Rearranging gives us: We are computing the distance to something in the scene based on disparity. In other words, disparity is inversely proportional to depth.
Finding Disparity
Given a point in an image,we know that a similar point in the other image has to be somewhere within some constraints. We can use Squared Eucliean distance to find the pixel in one image that was most similar to the pixel in another using a "feature patch": A smaller distance meant a more similar feature patch.